一、智能巡检机器人绳牵引系统的技术背景:
随着我国智慧矿山的建设与推动,智能化、自动化、数字化在矿山领域的应用越来越广泛,用于代替人工巡视的智能巡检机器人也应运而生。
而目前的巡检机器人大多采用蓄电池供电,这种机器人都受作业环境和地理环境的诸多限制,在封闭井巷、巷廊内因粉尘及潮湿等环境影响,机器人在长距离大坡度巡检时使用蓄电池续航的能力是一个短板,还容易受陡坡、台阶、沟渠等地面环境的限制,应用场景有限。
因此推动演化了绳牵引式巡检机器人的产生,此牵引装置能满足巡检运输距离最大达到3000-4000M。解决轨道式巡检机器人自行走巡航能力低,及机器人井下充电等问题。
二、产品技术标准:
该产品主要设计标准与依据为《煤矿安全规程》、《金属非金属矿山安全规程》、《煤矿用悬挂式/轨道式巡检仪安全技术要求》、《煤矿用架空乘人装置安全检验规范》、《地下矿用架空索道安全要求》等。
三、产品技术特征:
巡检机器人牵引系统目前主要有两种结构形式:轨道式巡检机器人绳牵引系统和悬索式巡检机器人绳牵引系统,针对不同的应用场景而进行选择设计。
巡检机器人与牵引系统采用Modbus协议通讯,以机器人为上位机控制牵引系统PLC主控,现实远程控制、智能巡检、精准定点、前进/后退、指定速度、往复运行、故障自检、综合保护等功能,是一种新型的先进的人工智能紧密结合的产品。
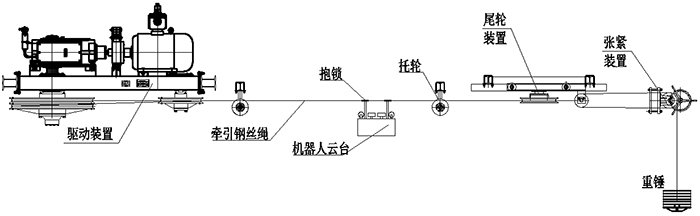
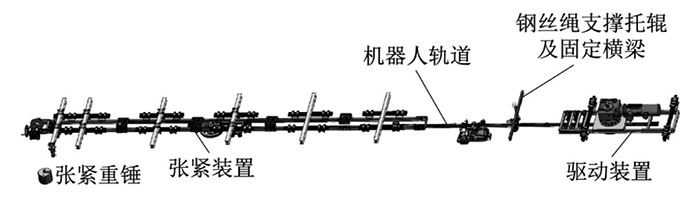
3.1轨道式巡检机器人绳牵引系统结构特征
该系统主要由驱动装置、钢丝绳托轮系统、尾部迂回系统、张紧系统、行走轨道、PLC电控系统等结构组成。
绳牵引系统由驱动装置提供动力,牵引钢丝绳带动巡检机器人在轨道上运行,在运行过程中能利用摩擦轮传动为机器人充电,解决了长距离大坡度巡检机器人电池巡航能力低,巡检机器人井下充电等问题。


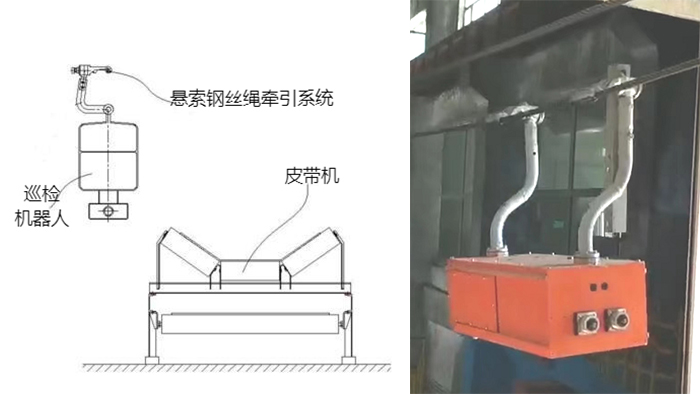
3.2悬索式巡检机器人绳牵引系统结构特征
该悬索牵引装置不设置轨道,巡检机器人直接挂载在钢丝绳上运行,采用先进的PLC控制的电控系统,由机器人上位机自动控制实现电气联动。
因无轨道运行,大大减低了产品的生产及安装成本,施工更加便捷。具有远程控制,精准定点巡检,前进/后退,指定速度,往复运行,故障自检,电控保护等功能,配置自动充电结构装置等,是一种新型的悬索式巡检机器人绳牵引系统。